Team Members
Objective
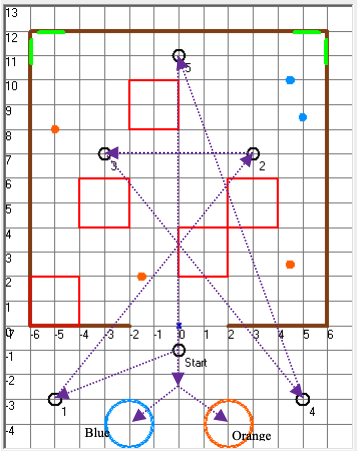
The objective of this project is to use astar algorithm on the robot car to keep track obstacles while it moving between wayspoints and weeds. While moving between waypoints, if the robot camera detect the color weed, it will exterminate those weeds first and report the position to LabView. Lastly, after we finished all the required waypoints, the robot car return to the corresponding base point and use the RC servo to report the number of weeds of each color exterminated. (corresponding base point are show in the picture below)
Sensors and Algorithm We Used in Our Project
Our robot used the A-star tracking algorithm to navigate the course. It kept track of obstacles while it moving from one point to the next (see attached image). Using the LADAR, it found obstacles to recalculate the path towards locating the weeds and then “killed” them. Kalman filtering was used to merge position data from an OptiTrack camera system and position data calculated from encoders on the wheels. The filtered data provides the robot with an accurate account of its position and orientation in the course, which was then seen in LABVIEW. Using the RC Servo, After the robot car run through all of waypoints, RC servo will report the number of weeds of each color exterminated. Using Camera, When there is a color weed in front of the robot, if the camera detect the weed and the robot have report the weed before, then the robot will move to the weed and exterminate it. However, it does not work every time, sometimes the camera can not detect the weed. To make sure our robot can detect the weed, we make another waypoint near the weed. Therefore, the robot can always detect all the weeds.
Group's Strategy for the Final Contest
While we running our robot in final contest, the robot camera sometimes will miss a color weed. Our strategy to fix that issue is to add another waypoint near the color weed, therefore, it will detect the "unseen" color weed. Also, since we know there will be no obstacles for waypoint 1 and waypoint 4, so to make it as effective as possible, we disabled the A* algorithm while the robot is behind the wall, and that helped us save lots of time.
LabView
Our Labview keep tract the robot position during the final contest via TCP/IP connection. When the robot detect and exterminate the color weed, it send data back to LabView. Based on the data, the Labview will report the color and corrdinate of the exterminated weed.